惯性导航
惯性导航系统(Inertial Navigation System,INS)是一个使用加速度传感器和陀螺仪来测量物体的加速度和角速度,并用计算机来连续估算运动物体位置、姿态和速度的辅助导航系统。
 张帅说传感
2021-07-20
张帅说传感
2021-07-20
 智能制造网
2020-10-30
智能制造网
2020-10-30
 枭枭
2020-10-29
枭枭
2020-10-29
 沃感科技
2020-10-20
沃感科技
2020-10-20
 仪表网
2020-10-13
仪表网
2020-10-13
 西贝网
2020-10-12
西贝网
2020-10-12
 传感世界
2020-10-07
传感世界
2020-10-07
 传神阿堵
2020-10-03
传神阿堵
2020-10-03
 航空工业信息中心
2020-09-29
航空工业信息中心
2020-09-29
 中电网
2020-09-27
中电网
2020-09-27
惯性导航产品










惯性导航品牌
惯性导航帖文
-
有一种导航叫做惯性导航,有一种系统叫做惯性导航系统(INS)惯性导航系统(INS)由加速度传感器和陀螺仪构成,三轴陀螺仪分别指向坐标轴中的xyz轴,在这三轴上再加上加速度计,通过三轴角度变化,三轴距离累计,就可以测量出物体在三维空间中的三轴位置移动,即相对三维空间位移 GNSS卫星导航,是根据卫星提供的经纬度位置信息,以及导航前规划的线路,来指引用户行驶。 INS和GNSS是可以彼此独立的两套导航系统,由于GNSS是持续性的绝对位置导航,而INS是通过航位推测,即DR(DeadReckoning)的方式,不依赖任何外部参照进行导航的,但INS由于存在长时间误差累积的问题 ,更适合短期导航,所以通常在应用中将INS惯导和GNSS结合起来使用,GNSS卫星系统担任主担任主导航,INS惯导系统作为备份导航,能很好地解决隧道、高楼、桥底、树林和山谷等遮挡环境下或者湖海边水面信号反射干扰环境下的定位行驶问题 当卫星信号被遮挡时,启动INS备份导航,能够保持导航的连续性。
-
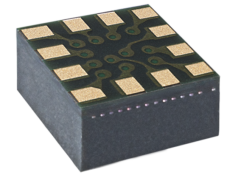
基于IMU和地磁传感器的捷联惯性导航系统摘要本文旨在介绍我们使用ADI公司的惯性测量单元(IMU)传感器ADIS16470和PNI的地磁传感器RM3100构建的捷联惯性导航系统(SINS)。 相反,在捷联惯导系统中,惯性传感器直接固定在车辆本体上,这意味着传感器会与车辆一起旋转。这种捷联方法消除了稳定平台惯导的缺点。然而,平台惯导的准确性通常高于SINS。 对于大多数服务机器人或AGV导航应用,这一精度足够了。导航方法很多,包括机器视觉、GPS、UWB、SLAM型激光雷达等。基于IMU的惯性导航始终是导航的重要组成部分。 然而,由于这种传感器的限制——例如偏置误差、轴间误差、噪声,特别是零偏不稳定性——惯性导航通常需要采用一个伙伴传感器,定期为它提供参考或校准,本文将这种情况称为传感器融合。 在本文中,我们使用ADI的IMUADIS16470和地磁传感器来开发平台和算法,实现捷联惯性导航系统。但是,地磁传感器只能提供姿态信息。对于航位推算或距离测量,我们只能使用IMU中的加速度传感器。
-
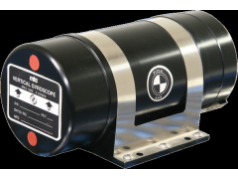
2022-06-29国产飞控机的突围:惯性传感器篇707 所主导专业领域为惯性导航系统、舰船操纵系统、惯性元件以及军用抗恶劣环境加固计算机等产品的开发、研制和生产,是一个以惯性导航、综合导航和舰船操纵控制系统研制和装备生产为主,以“机光电”一体化为专长 、惯性器件及导航等的研制生产。 航天电子2016年收购了航天九院在惯性导航领域的所有生产厂之后,形成了平台式惯性导航、激光惯性导航、光纤惯性导航系列化的元器件及系统的生产能力,主要应用于航天宇航和制导武器领域。 ;研制成功首个定型装备的光纤捷联惯性导航系统,开创了光纤捷联惯性导航系统在飞航武器领域应用的先河,成为国内光纤陀螺及导航系统发展的里程碑;研制成功高性能快速响应电动舵系统,在国内首次实现电动舵系统在超声速飞行器上的成功应用 主要导航类产品有:挠性平台式惯性导航系统、挠性捷联综合惯性导航系统、激光捷联式惯性导航系统、光纤捷联航姿系统。
-
2024-03-05
-
2022-06-29车载惯性传感器的四大作用2、惯性导航城市峡谷驾驶导航已经内建在导航系统的仪表板内,这些技术可降低在陌生城市中自动导航的压力。 藉由地图,全球导航卫星系统(GNSS)的讯号、择路运算以及惯性导航系统甚至可透过车联网服务,提供交通堵塞时的即时消息。 汽车工程师喜欢在导航系统中加入惯性传感器,因为这些系统无论在「城市峡谷」,或是在GNSS讯号差、无效或根本就没有讯号的地方仍可继续运作。 推测导航运算再进行位置变化的计算,就可根据惯性传感器的讯号推断你当前所在的位置。3、驾驶辅助在各式驾驶辅助技术中,不仅只是巡航控制或后视摄影机。 相同地,惯性传感器也是利用摄影机、雷达和雷射来达到辅助驾驶。侦测技术则可藉由预测汽车的移动来达成自动驾驶。4、惯性传感器和感知传感器的融合那视觉和感知系统又是如何从惯性传感器中获益的呢?
-
2024-04-28
-
2024-01-29
-
2023-10-21
-
2023-11-28
-
2023-11-28