移动机器人应该能够有效地导航现实世界的环境,避免人类或周围环境的其他障碍,才能完成人类设计的任务。虽然静态对象通常很容易被机器人检测和规避,但是避免人类可能更具挑战性,因为这需要预测其未来的运动并相应地进行计划。
加州大学伯克利分校的研究人员最近开发了一种新的框架,该框架可以增强办公室,房屋或博物馆等室内环境中人类的机器人导航能力。他们的模型在arXiv上预先发表的一篇论文中提出,并在称为HumANav的真实感图像数据集上进行了训练。
研究人员在论文中写道:“我们提出了一种围绕人类导航的新颖框架,该框架将基于学习的感知与基于模型的最佳控制相结合。”

这些研究人员开发的新框架被称为LB-WayPtNav-DH,它包含三个关键组件:感知,计划和控制模块。感知模块基于卷积神经网络(CNN),该神经网络经过训练可以使用监督学习将机器人的视觉输入映射到航路点(即下一个所需状态)。
然后,由CNN映射的航路点将被馈送到框架的计划和控制模块。这两个模块结合在一起,可确保机器人安全地移动到其目标位置,从而避免了周围环境中的障碍物和人员。

该图说明HumANav数据集包含的内容以及它如何实现包含人的室内环境的真实感渲染。图片来源:Tolani等
研究人员在他们被称为HumANav的数据集中包含的图像上训练了CNN。HumANav包含从另一个称为SURREAL的数据集改编而成的模拟建筑物环境的逼真的渲染图像,人类可以在该环境中四处走动。这些图像描绘了6000个行走的,有纹理的人体网格,按人体形状,性别和速度排列。
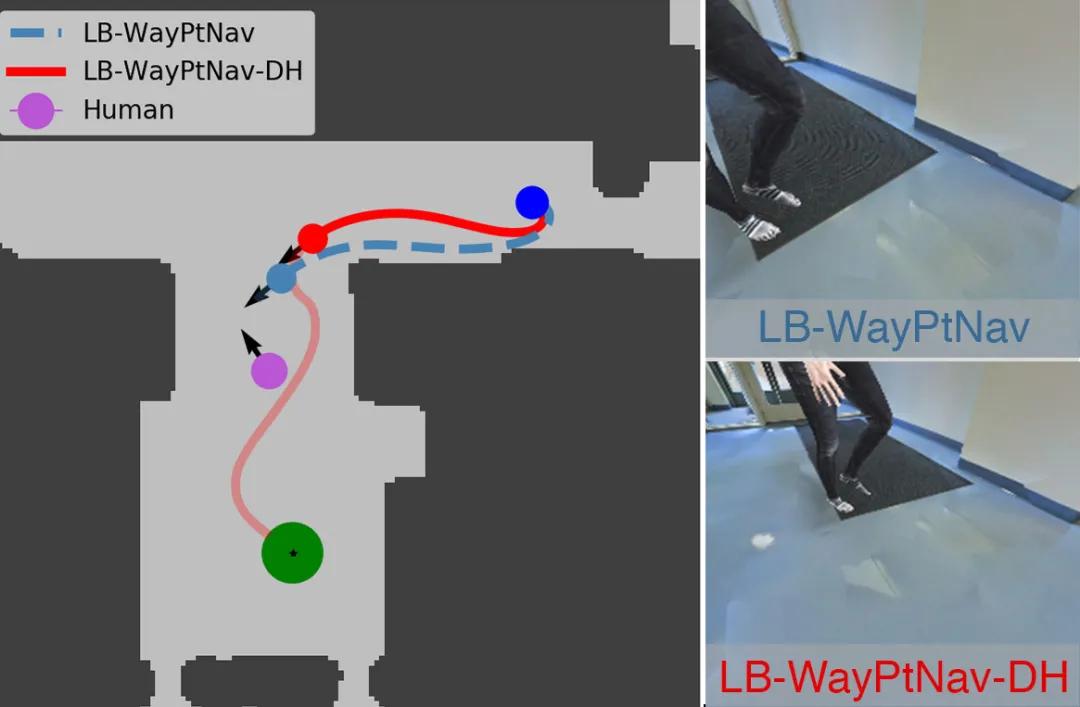
研究人员在论文中写道:“所提出的框架学会仅基于单眼RGB图像来预测和响应人们的运动,而无需明确预测未来的人类运动。”
研究人员在模拟和现实世界中的一系列实验中评估了LB-WayPtNav-DH。在实际实验中,他们将其应用于Turtlebot 2,Turtlebot 2是一款带有开源软件的低成本移动机器人。研究人员报告说,机器人导航框架可以很好地推导出看不见的建筑物,从而在模拟和现实环境中有效规避人类。

图片来源:Varun Tolani MS
研究人员在论文中写道:“我们的实验表明,与单纯基于学习的方法相比,将基于模型的控制与学习相结合可以带来更好,更数据有效的导航行为。”
新框架最终可以应用于各种移动机器人,从而增强其在室内环境中的导航能力。到目前为止,事实证明,他们的方法表现出色,可以将模拟开发的策略转移到实际环境中。
在未来的研究中,研究人员计划在更加复杂或拥挤的环境的图像上训练他们的框架。此外,他们想扩大他们编辑的训练数据集,包括一组更加多样化的图像。