每个任务都从一个好主意开始。查尔斯·德圭尔(Charles Deguire)年轻时,他正在帮助三个患有肌营养不良症的叔叔。查尔斯的使命变得清晰,他将这个想法远远超出他叔叔的设计,他叔叔发明的一个巧妙的临时手臂,在此基础上他发明了一种独立的取物装置。
他们与联合创始人路易斯·约瑟夫·勒库耶(Louis Joseph L’Écuyer)不懈合作,于2006年成立了Kinova,推出了他们的第一款机械臂Jaco,进而升级为Jaco (v2) / Gen2,自此他们通过创造以人为中心的安全技术改变着机器人学的范式。

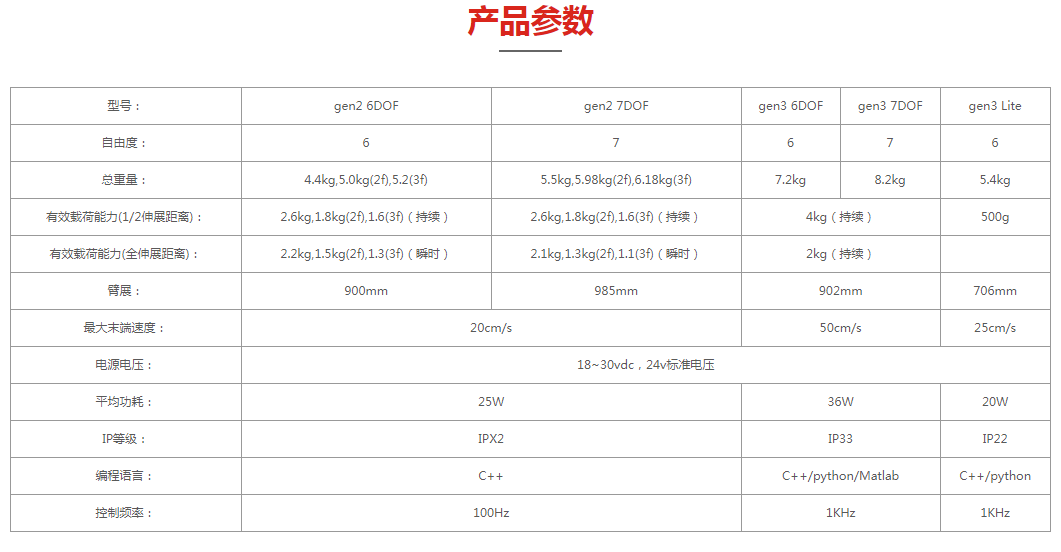
Kinova机器人应用于工业自动化,医疗机器人,研究和教育行业。尤其是自创立就专注于助老、助残协作机器人硬件的研发,其Gen3机械臂重量只有8.2kg,其传感器技术帮助产品实现了功率和力的限制功能,通过减少机器人本身的质量和冗余设置,以轻量化来保证产品的作业安全,保证了项目应用过程中的绝对安全性要求。助老、助残机器人最显著的特点是人机协作,而安全性则是人机协作的前提和基础。Kinova机械臂具备高安全性,非常适合这些行业的应用。随着终端用户的增多,更多的应用被开发了出来:智能轮椅、脑机接口、服残、助老、移动操控、智慧医疗。
Kinova机器人公司设计研发的轻量化高集成度机器人使得各个领域的研究人员能够更快地实现其目标,并且具有高度灵活性,可伸缩性和易操作性等特点,从而可以在非结构化的人类环境中执行动态的抓取和操纵任务。KINOVA超轻量级系列机械臂,具有开放式体系结构,ROS兼容性和软件工具,可实现最佳性能和灵活性。
JACO2 6自由度机械臂是加拿大KINOVA公司的一款经典产品,设计非常的精简紧凑,移动的精度很高,能在Windows和Linux下驱动,我想拿它验证一些控制算法,以及配合计算机视觉完成一些目标识别和抓取的工作。继JACO2 6DOF 后,Kinova推出了gen2 7DOF gen3 6DOF gen3 7DOF gen3 Lite,受到用户好评。
声明:除原创内容及特别说明之外,推送稿件文字及图片均来自网络及各大主流媒体。版权归原作者所有。如认为内容侵权,请联系我们删除。