
研究背景

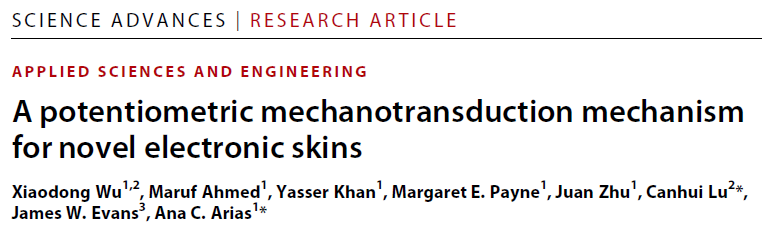
人体皮肤通过感知皮肤感觉细胞膜电位的变化来感知外部机械刺激。许多科学家已经尝试基于主动和被动感应机制来重建皮肤功能并开发电子皮肤。 在皮肤的感觉系统中(图1A),皮肤机械感受器使我们能够通过膜电位的变化来感知外部机械刺激。静止时,皮肤感觉细胞的内部通常相对于外部带更多的负电荷(图1B)。当外部刺激与感觉细胞耦合时,机械门控的离子通道将打开,从而允许离子迁移或流过细胞膜。这个过程使膜电位大大上升(图1C,去极化阶段)。随着机械刺激的释放,膜电位通过将特定离子泵回细胞膜而回到初始水平(图1C,复极化阶段)。这种通过膜电位变化的机械转导机制提供了一种高效且节能的方式来感知环境刺激。

创新点

加州大学伯克利分校Ana C. Arias课题组和四川大学高分子研究所Canhui Lu受皮肤感觉行为的启发,研究了材料和电子器件使我们可以将机械刺激编码为两个电极之间测得的电位差,从而产生电位机械传递机理。作者介绍了一种通过全溶液处理方法制造的电位机械换能器。这种机械换能器具有超低功耗,高度可调的传感特性,并且能够检测静态和低频动态机械刺激。此外,作者开发了两类新颖的传感器件,包括对应变不敏感的传感器和单电极模式电子皮肤。这种机械转导机制通过提供大大改善的人机界面,对机器人技术,修复技术和医疗保健产生了广泛影响。

文章解析

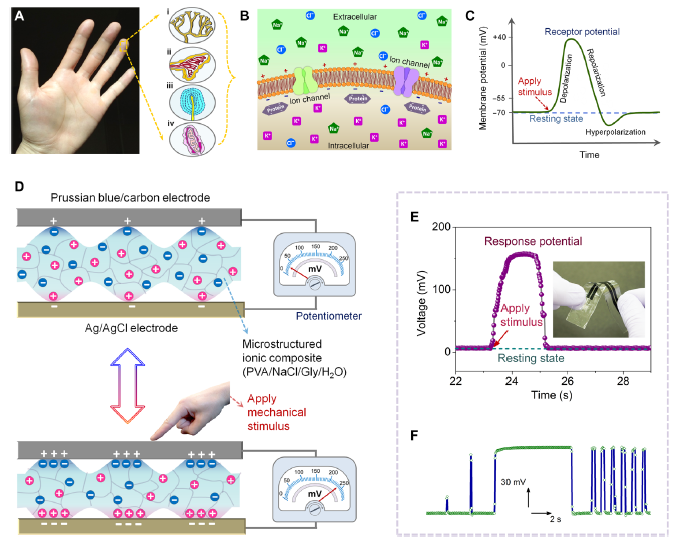
图1:受皮肤的感觉行为启发的电位传感机械转导机制。上-显示了跨细胞膜的不对称离子分布,在感觉细胞的内部和外部之间形成了电位差。下-普鲁士蓝和Ag/AgCl中的两个可逆氧化还原反应用于产生电势差。通过电解质的结构和成分操纵,可以通过施加力逐渐改变两个电极之间产生的电势差。因此,外部机械刺激可以直接耦合到电压信号输出,就像皮肤感觉细胞将机械刺激耦合到膜电位变化一样。
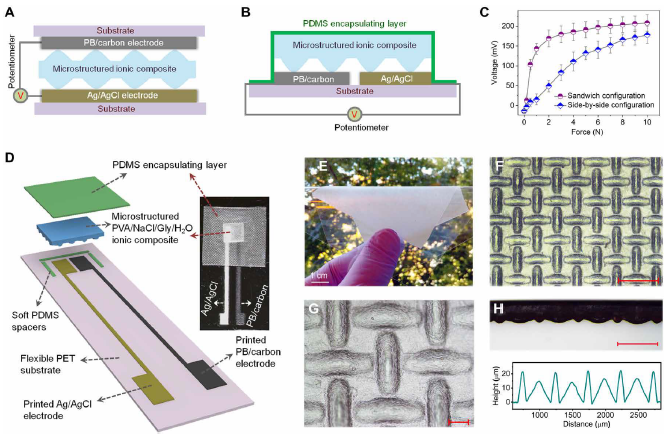 图2:基于溶液法的电位传感器的制造。上-示意图显示了具有夹心结构和并排电极配置的机械换能器。下-电位式机械换能器的示意图和照片。
图2:基于溶液法的电位传感器的制造。上-示意图显示了具有夹心结构和并排电极配置的机械换能器。下-电位式机械换能器的示意图和照片。
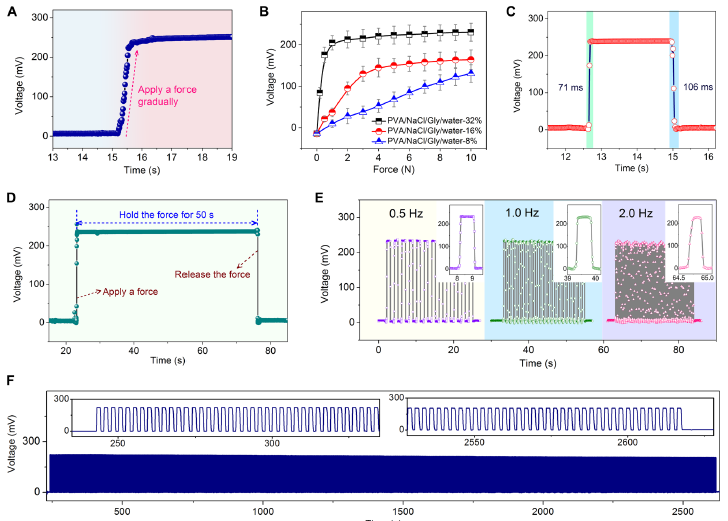
图3:电位式机械换能器的响应行为。(a) 在逐渐向器件施加力的同时记录机械换能器的电压信号,显示出连续且平滑的机械换能行为。(d)机械传感器上记录的电压信号,同时在设备上施加静态力达50 s。静力作用下的电压信号几乎是恒定的,这证明了机械换能器记录静态机械刺激的能力。(E)在设备上施加动态力(分别为0.5、1.0和2.0 Hz)时,机械换能器的电压信号变化,表明可以监视低频动态刺激。(F)通过在设备上加载和卸载力1000次来对机械换能器进行可靠性测试。
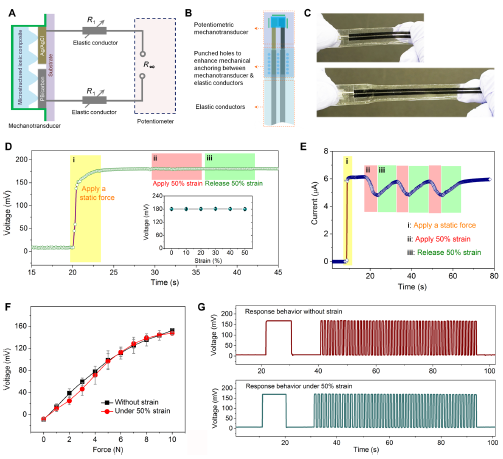
图4:具有应变无关感测性能的可拉伸机械传感器。(a) 显示了应变不敏感型电位计传感器工作原理的电路模型。(d)可伸缩电位传感器的记录电压信号,该过程首先是对传感器施加恒定的力(阶段i),然后施加(阶段ii)并释放(阶段iii)50%的应变。(g) 用于监控手指触摸的可伸缩传感器的响应行为:无应变,并且在传感器上施加了50%的应变。
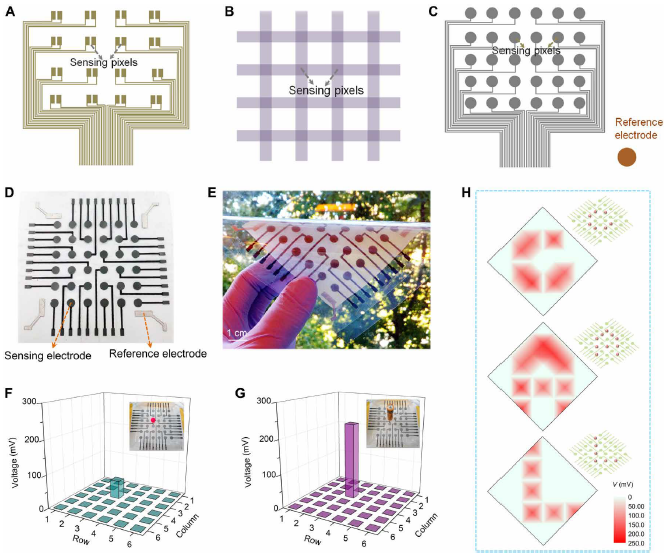 图5:单电极模式皮肤。用于电子皮肤制造的电极配置:双电极模式(A),交叉网格电极模式(B)和单电极模式(c)。(F-G)当在3行*3列像素上放置≈0.8g(接触面积为≈8.0mm2)的橡皮泥球和≈11.0g(接触面积为≈26.4mm2)的电池时,电子皮肤的响应行为。(H)当钢球(约1.0 g)放置在皮肤上时,每个像素相对于参考电极的电位差的示意图和空间映射,形成字母“ C”,“ A”和“ L” ”。
图5:单电极模式皮肤。用于电子皮肤制造的电极配置:双电极模式(A),交叉网格电极模式(B)和单电极模式(c)。(F-G)当在3行*3列像素上放置≈0.8g(接触面积为≈8.0mm2)的橡皮泥球和≈11.0g(接触面积为≈26.4mm2)的电池时,电子皮肤的响应行为。(H)当钢球(约1.0 g)放置在皮肤上时,每个像素相对于参考电极的电位差的示意图和空间映射,形成字母“ C”,“ A”和“ L” ”。

读后感

作者展示了一种受皮肤感觉行为启发的电位机械传递机制。该电位机械换能器通过全溶液加工方法制造,并具有超低功耗(小于1 nW),高可调性以及良好的检测静态和低频动态机械刺激的能力。最后,作者报告了两类新型器件:(i)具有应变独立感应性能的可拉伸机械传感器,以及(ii)与像素密度和数据采集速度相比具有改进的单电极模式电子皮肤传统的双电极模式电子皮肤。
【参考文献】

https://advances.sciencemag.org/content/6/30/eaba1062
【相关阅读】
电子皮肤-双功能应变、机电信号监测
电子皮肤-集成压力与应变的顺应性传感器
...................................................

该平台免费提供相关领域的论文宣传和招生招聘,有兴趣请关注订阅号给小编留言或者邮件联系 E-mail:wonger.west@gmail.com
E-mail:wonger.west@gmail.com