本文来自微信公众号:中国航天(ID:zght-caecc),作者:范唯唯、杨帆(中国科学院科技战略咨询研究院)、鲁暘筱懿(国家遥感中心)、李会超(哈尔滨工业大学),原文标题:《俄罗斯“月球”25任务详解及未来月球探测任务展望》,题图来源:《月球陨落》
在1958~1976年的第一次国际月球探测高潮中,美国和苏联展开了激烈的竞争。可以说,在美国实现载人登月之前,苏联一直在月球探测方面领先于美国,为月球研究作出了巨大贡献。苏联的无人探测器第一次拍摄了月球背面的图像,第一次实现月球硬着陆和软着陆,第一次完成绕月飞行,第一次实现月壤采样返回,第一次对月球进行巡视探测,取得了丰富的科学与工程成果。
21世纪初,随着俄罗斯国家航天部门从苏联解体的冲击中逐渐恢复,俄罗斯科学界在强化优势的战略需求引导下,依靠在探月领域积累的丰富经验,提出重返月球计划,重点聚焦月球南极地区,计划对月表水冰分布、内部结构、月壤成分分析与采样返回、外逸层与行星际介质的关系等方面开展全方位的研究。“月球”25(Luna-25)作为俄罗斯宏大的月球探索与开发计划第一阶段的首个任务,将使人类从月球南极这个全新的视角了解太阳系天体的发展,有望产生巨大的科技、政治和经济影响。
一、“月球”25任务的立项与研制历程
月球是地球唯一的天然卫星,是人类探索外层空间的“前哨站”。自首颗人造地球卫星发射以来,人类共发射了百余个月球探测器,在行星物理学、比较行星学、行星地质学和天体化学等方面开展了较为详细的研究,极大地丰富了人类对月球的认识。
然而,目前人类对包括月球起源与内部结构等在内的太阳系起源演化等许多关键问题,仍认识不足,而开展月球探测对了解地球早期历史及地球和类地行星演化路径具有十分重要的意义,特别是在月球极地地区发现水冰和挥发性沉积物后,使得制备空气、水和燃料,以及在月球建立具备长期自持能力的有人基地成为可能。因此,以月球开发为战略起点,开展相关资源的探测和基础设施建设成为当前世界主要航天国家和商业航天公司的布局重点。
1976年,苏联发射“月球”24探测器,之后受限于国家社会经济状况,俄罗斯再未发射新的月球探测器。1998年10月,俄罗斯科学院院士加利莫夫(E.M. Galimov)在莫斯科国际月球探测会议上再次提出月球探测任务的概念,被视为现代俄罗斯重返月球计划的开端。然而,由于当时预算不足,“福布斯-土壤”(Phobos-Grunt)火卫一探测器和“光谱”(Spektr)系列天体物理观测台被列为更高优先级任务,月球计划只得暂时被搁置。
2006年,在俄印《关于以和平目的探索和利用外层空间的政府间协定》框架下,俄罗斯科学院和拉沃契金科研生产联合体再度提出开发一系列旨在对月球两极自然资源开展勘探性研究的月球无人轨道器和着陆器任务,为体现与印度的国际合作属性,首个任务被命名为“月球-全球”(Luna-Glob),该探测器包括1个轨道器和1个着陆器,前者将在极地轨道对月表进行全球性探测,后者将对月球南极附近月表和外逸层开展详细研究。
与此同时,“月球-资源”(Luna-Resurs)任务也在同期推进,同样包括1个轨道器和1个着陆器。俄罗斯科学院空间委员会早在2010年就完成了2个任务中着陆器搭载的有效载荷的竞争性遴选。但是,随着2011年“福布斯-土壤”任务的失败,与之共用同一星载系统的“月球-全球”和“月球-资源”任务受到影响并重新进行资源配置,扩大了地面试验验证规模;之后俄罗斯决定放弃与印度的合作,改为独立实施,任务仅保留了“月球-全球”中着陆器的概念,暂定于2015年发射。在俄罗斯科学院的建议下,“月球-全球”被纳入《2016-2025联邦航天计划》,并延续苏联“月球”系列任务的命名方式,更名为“月球”25。
“月球-资源”中的轨道器和着陆器也分别更名为“月球”26和“月球”27。然而,由于新型星载系统研发进展缓慢,以及2014年以来俄罗斯受西方大规模技术经济制裁,造成元器件进口受限,重新进行国产化设计与采办及各部门间协调耗费了大量时间,设备精度测试不达标、需要返厂检修等多重原因,导致“月球”25发射时间一再延期。
月球探索是俄罗斯重塑航天大国形象的重要战略,俄罗斯总统、政府和主责机构相继签署和发布了中长期航天政策与实施计划,“先利用无人航天器开展月球探测,为后续载人登月、建设月球基地等远景目标奠定技术基础”的发展路径也日益清晰。“月球”25肩负着验证俄罗斯新时期月球软着陆技术的重任,聚焦月球极地风化层和外逸层特性研究,将为后续建立月球科研站提供科学数据支持。
二、“月球”25任务概况
“月球”25的总质量为1605kg,设计寿命1年,计划于2023年8月从东方航天发射场发射,主要任务是验证月球极区软着陆技术,探测该区域的内部结构和自然资源,研究宇宙线和电磁辐射对月表的影响。
(一)科学目标
据俄罗斯科学院空间研究所(IKI)核行星学研究室主任伊戈尔·米特罗法诺夫(Igor Mitrofanov)介绍,“月球”25的所有科学探测计划可以归纳成3个主题:寻找水,探究地月系统的形成与演化,揭秘外逸层中各种粒子间的动力学过程。其研究成果将对后续无人和载人月球探测与开发项目产生重大影响。
“月球”25的首要科学目标是通过直接接触极区月壤,验证水冰存在的假设。俄罗斯航天理论奠基人齐奥尔科夫斯基(K. E. Tsiolkovsky)早在1920年就提出了月球极区存在冰川的假设。2009年,印度“月船”1(Chandrayaan-1)搭载的美国国家航空航天局(NASA)月球矿物制图仪(Moon Mineralogy Mapper)在克拉维乌斯月坑(Clavius crater)检测到了3μm红外波段信号,这表明月球极区存在水或羟基分子。
随后月球资源受到各国航天部门和科学界的高度关注,于是NASA以“一箭双星”的方式发射了“月球勘测轨道器”(LRO)和“月坑观测与感知卫星”(LCROSS),对月球极区开展详细探测。“月球”25将成为首个对月壤水分质量分数进行直接估算的航天器,估算结果可与月球轨道器的测绘数据进行比较,完善对整个月球南极的水资源含量评估。
第二个目标是通过研究从艾特肯盆地(Aitken Basin)深处抛射到月表的物质,进一步了解地月系统的形成。位于月球南极的艾特肯盆地是太阳系中面积最大的陨石坑之一,是由大型陨石撞击原始月球时形成的。“月球”25将在艾特肯盆地附近着陆,测量该区域的月壤岩石和天然放射元素成分,并与以往任务采集的月壤样品进行比较分析,评估盆地抛射物可能造成的影响。
第三个目标是首次开展月球极区外逸层中空间等离子体,与中性粒子及月尘之间进行相互作用的研究。月球极区的外逸层与温带区域的外逸层明显不同,这是由于极冠附近太阳风的流动几乎与月表平行,各种粒子间的动力学过程更为复杂。“月球”25将详细研究挥发性化合物分子在月球光照面和阴影面的凝结与升华,以及月球白昼期间悬浮月尘的影响。
(二)主要有效载荷
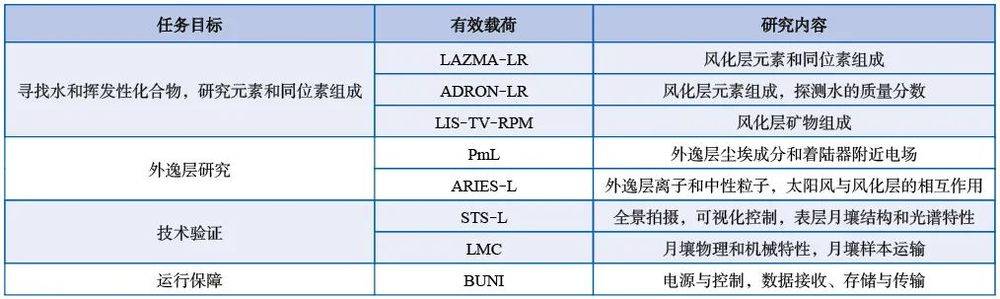
为实现上述科学任务,“月球”25共携带了8种有效载荷仪器(见图1和表1),均为俄罗斯科学院空间研究所研制。与以往“月球”系列探测器不同,“月球”25搭载的载荷外部均没有密封封装,以便减轻结构质量,增加有效载荷的质量份额。所有的有效载荷只在月昼期间开展科学研究,而在月夜期间完全关闭,通过放射性同位素源保障其热状态。主要有效载荷仪器如下:
(1)中子-伽马频谱仪(ADRON-LR)。该频谱仪在俄罗斯科学院空间研究所为美国“好奇”(Curiosity)火星车提供的中子动力学反照率(DAN)仪器基础上研发而成,旨在测定着陆点月壤表层1m深度的元素组成及含水量。
(2)离子和中性粒子分析仪(ARIES-L)。该分析仪旨在分析月球风化层的组成与性质,研究太阳风与月表、月球两极外逸层的相互作用,以及风化层表层离子的解吸过程。
(3)激光电离质谱仪(LAZMA-LR)。该质谱仪旨在以高精度和高空间分辨率对固体样品(风化层和月尘)的元素及同位素进行分析,表征着陆点的地质特征,分析月尘成分,寻找稀土元素、天然金属与合金,测定风化层中化学束缚水的含量,帮助解决月球形成与演化条件相关的基本问题。相关结果还可与美国“阿波罗”(Apollo)系列任务、苏联时期“月球”系列任务采集的月壤样本成分进行比较分析。
(4)月球红外光谱仪(LIS-TV-RPM)。该光谱仪安装在机械臂上,通过测量月表反射的太阳辐射光谱,在1.15~3.3μm的红外波段研究月表风化层矿物组成,评估水和羟基分子含量。
(5)机械臂(LMC)。该机械臂末端是一个可挖掘15~30cm深月壤的铲斗,采集月壤并运送给激光电离质谱仪以便研究其机械特性,帮助矿物红外光谱仪对准周围目标。
(6)微颗粒测量仪(PmL)。该测量仪通过对月表上方单个微粒开展长时间记录,测量和评估其动量、速度、电荷、质量、密度等物理特性,探测近月表尘埃等离子体环境参数,如密度、温度和电势等,其将成为继50多年前首次发现悬浮的月尘以来,第一次研究月尘在月球外逸层多变环境下行为的仪器。
(7)服务摄像系统(STS-L)。该系统包含8个采用互补金属氧化物半导体(CMOS)传感器的相机和1个可长期存储数据的计算单元,可以对航天器下降、着陆和月表工作期间的情况进行全景成像,对采样区进行三维建模,获取有关月表结构与组成、风化层光谱与形态特征数据。
(8)电力开关与数据传输(BUNI)。该仪器质量为2.4kg,可以操控除服务摄像系统外的其他所有仪器,用于保障仪器的电力供应、发送控制命令、收集和存储科学遥测数据。使用电力开关与数据传输这类特殊设备作为有效载荷和航天器系统之间的接口是俄罗斯航天任务的传统设计模式,可以在人不与航天器系统发生接触的情况下对有效载荷进行地面测试。
此外,欧空局(ESA)原计划在“月球”25上安装“领航员”D(Pilot-D)导航照相机以进行技术验证,将其作为欧洲“领航员”系统光学器件的原型机,用于保障航天器在月表的精准、安全着陆。受俄乌冲突影响,ESA终止了与俄罗斯在月球任务上的合作,并要求俄方拆除和归还该装置。
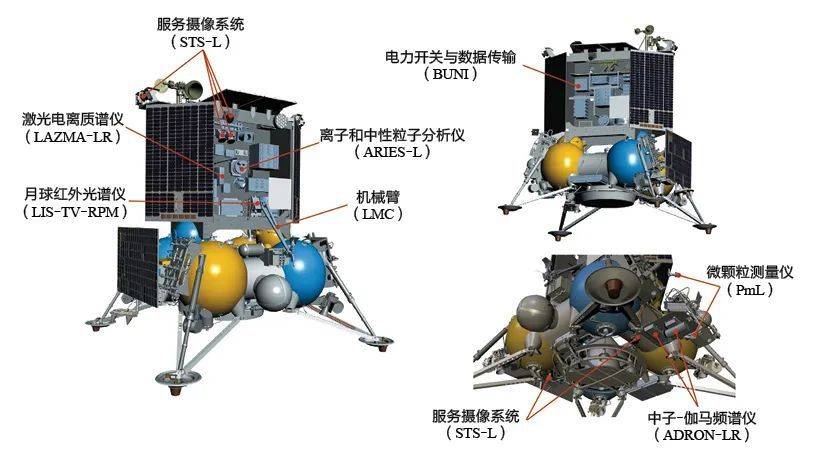
图1“月球”25有效载荷布局示意图
表1“月球”25主要任务与有效载荷的关系
(三)着陆点选择
与第一次国际月球探测热潮中航天器主要降落在月球赤道和中纬度地区不同,“月球”25将首次在月球南极着陆。着陆月球的探测器位置分布如图2所示。由于月球南极地形更复杂,因此“月球”25任务的实施难度更大。
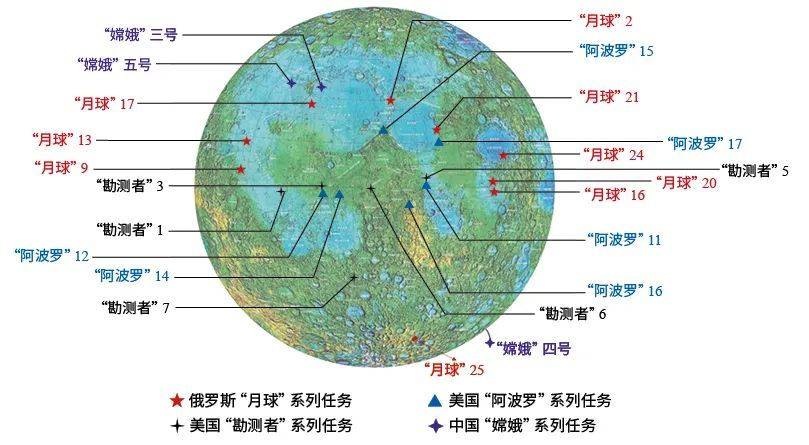
图2 着陆月球的人造探测器位置分布
俄罗斯科学院空间研究所利用安装在NASA“月球勘测轨道器”上的月球勘探中子探测器(LEND)的测量数据,同时参考了“月球勘测轨道器”搭载的激光测高仪(LOLA)、窄角相机(NAC)和广角照相机(WAC)数据,以及日本“月亮女神”(SELENE/Kaguya)拍摄的月表地形数据,综合构建出月表地形数字模型。由于“月球”25未配备用于高精准着陆和危险规避的主动机动系统,因此其着陆区域必须足够大,是一个长轴约30km、短轴约15km的椭圆形区域。为防止航天器在着陆时发生侧翻,要求着陆区地形坡度不应超过7%,石块直径不超过15cm。此外,根据探测器作业需满足的工程要求,着陆区受日照时长不应短于月球日(相当于29.5个地球日)的40%,无线电信号在地球接收的时间不应少于50%。
专家组从所有满足条件的69个候选区域中选择了2个着陆区:博古斯瓦夫斯基月坑(Boguslawsky crater)北部东经43.544°、南纬69.545°的首选区,和曼齐纳斯月坑(Manzinus crater)西南方向东经21.210°、南纬68.773的备选区。这两处着陆点表层中水分的质量分数最大估值为0.5%,表明地下可能存在水冰。根据模型估计,首选区的最大空间分辨率可达2m,与“月球”25尺寸相当,备选区的最大空间分辨率为30m。降落在备选区的时间将比在首选区晚2天左右。
“月球”25采用经过环月轨道的着陆方式(见图3)。这种方式使探测器有比较充分的环月运行时间用于选择、控制着陆时机和对设备进行测试,落点精度高,但是飞行时间比较长。
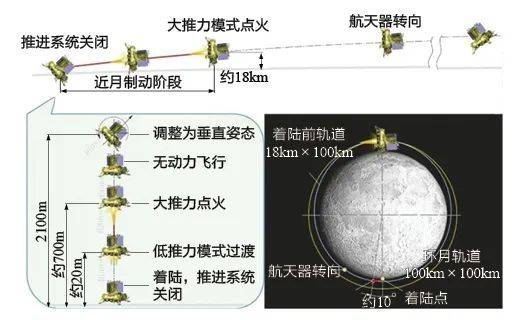
图3“月球”25着陆方案
三、俄罗斯未来月球探测任务
按照当前的俄罗斯月球探测计划,“月球”25后还将发射“月球”26、“月球”27和“月球”28等3个无人探测器,为后续载人登月和建立月球基地作充分准备。
(一)“月球”26
“月球”26任务是一项旨在对月球开展全球性综合研究的计划,由日本、捷克、斯洛伐克和瑞典等国共同参与并提供载荷。该任务暂计划于2027年发射,探测器质量为2250kg,其中有效载荷质量为160kg。任务设计寿命3年,第一年将在近月点50km、远月点80km的椭圆轨道上运行,后两年将在150km的极轨运行,如图4所示。
其主要科学目标包括:绘制月球矿物成分和月表水冰分布图,2~3m分辨率测绘月表地形,研究月表下层结构,研究月球外逸层和等离子体环境与月表等离子体的相互作用过程,开展宇宙线和超高能中微子相关研究,为后续“月球”27提供数据中继服务,为选择载人登月地点提供信息。

图4“月球”26轨道器示意图
“月球”26将携带13种有效载荷仪器:研究月球风化层元素组成和含水量的伽马中子光谱仪(LGNS),绘制月表水合矿物图的红外光谱仪(LUMIS),拍摄月表并建立高分辨率地形模型的立体相机(LSTC),研究月球内部结构的多用途雷达系统(RLC-L),沿轨道测量恒定磁场的磁强计(LPMS-LG),研究行星际介质与月球的相互作用的电磁发射监视器(LEMRA-L),观察太阳风流动及其与月表相互作用的太阳风快速监测器(BMSV-LG),测量离子和电子通量的高能粒子光谱仪(Asc-L),研究太阳风与月表相互作用的全景离子能量分析仪(LINA-R),中性粒子探测器(LINA-S),精确测量航天器位置和速度并研究月球极区引力异常的无线电接收器,记录环月空间流星体的物理动力学参数的宇宙尘埃探测器(Meteor-L),作为航天器与科学载荷集成接口的信息采集与控制系统(SSRNI-2)。
(二)“月球”27
“月球”27着陆器是继“月球”25后的第2个测试高精准着陆技术的月球着陆器,暂计划于2028年发射,探测器质量为2200kg,设计寿命1年(见图5)。其主要科学目标是探测月表水冰,研究月表磁异常现象及行星际介质对月表产生的影响,研究月表下2m深月壤的矿物学、化学、同位素组成,研究月壤机械、热能等物理特性,研究月球外逸层的离子、中性粒子、尘埃与行星际介质的关系,开展月球内部结构和月震机制研究。
图5“月球”27 着陆器示意图
“月球”27将携带15种有效载荷仪器(其中大部分与“月球”25携带的仪器相同):中子-伽马频谱仪、质谱分析仪、离子和中性粒子分析仪、激光电离质谱仪、月球红外光谱仪、中性粒子和离子测量仪(LINA)、微颗粒测量仪、无线电信标、月壤热性能射频测量仪(RAT)、地震活动测量仪(SEISMO-LR)、矿物质紫外成像光谱仪(TV-Spectrometer)、机械臂、服务摄像系统、激光角反射器和电力开关与数据传输设备。
(三)“月球”28
“月球”28是实施载人登月前的最后一个无人探测器,也是俄罗斯重返月球计划中的首个返回式探测器,其将采集月表下方2m处的月壤,并将月壤样本低温保存送返地球。“月球”28的设计尚处于初期阶段,其构型及计划搭载的有效载荷还没有确定。目前,俄方考虑将采样返回任务与未来载人“月球着陆-上升”模块技术验证相结合,由Marfa多功能机器人来执行操作。若“月球”28得以顺利实施,将标志着月球探测从科学研究过渡到资源利用阶段。
四、结束语
月球作为地球的天然卫星,具有极高的科学研究价值,是未来火星和深空探测路径中的重要一站。现阶段俄罗斯月球计划的重点是考察月球南极地区,在《2016-2025联邦航天计划》框架下,俄罗斯通过开展“月球”25、“月球”26、“月球”27和“月球”28等任务解决月球南极软着陆、月表和月壤组成及物理性质研究、采样返回等问题,为未来建设月球科研站提供数据支撑。
在中俄关系提升至全面战略协作伙伴关系的新阶段,俄罗斯先后与中国签署了《中华人民共和国国家航天局与俄罗斯联邦国家航天集团公司关于协同实施“嫦娥七号”月球极地探测任务和“月球-资源-1”轨道器任务合作协定》《中华人民共和国国家航天局与俄罗斯联邦国家航天集团公司关于建立联合月球与深空探测数据中心的合作协定》《中华人民共和国政府和俄罗斯联邦政府关于合作建设国际月球科研站的谅解备忘录》等文件,并面向国际社会开放月球项目合作。“月球”25的顺利发射对俄罗斯重返月球计划而言具有里程碑意义,也将为未来中俄月球项目合作奠定基础,任务的后续成果值得持续关注。
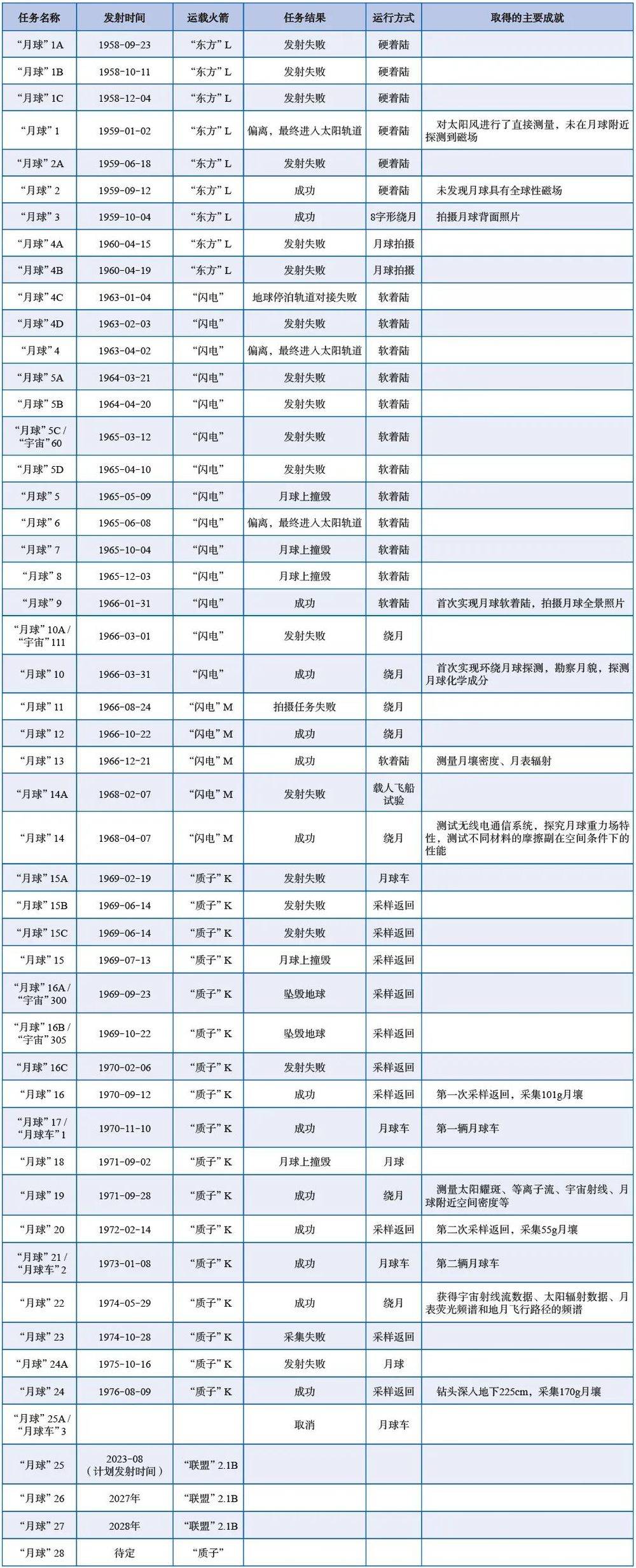
附表 苏联/俄罗斯“月球”系列任务一览
本文来自微信公众号:中国航天(ID:zght-caecc),作者:范唯唯、杨帆(中国科学院科技战略咨询研究院)、鲁暘筱懿(国家遥感中心)、李会超(哈尔滨工业大学)