电子驻车制动系统(Electronic Parking Brake, EPB)作为一项汽车底盘安全配置,被越来越多的驾驶者所认可。EPB相对机械手刹,具有以下明显优势:首先EPB对于驾驶者更加友好,不仅能在拥堵的城市道路解放因频繁驻车带来的烦恼,而且可以辅助驾驶者坡道平稳起步,消除因溜坡带来的安全隐患;其次EPB 与电动平台具有更好的契合度,能与电控的刹车防抱死系统(Anti-lock Brake System, ABS)/车身电子稳定控制系统(Electronic Stability Controller, ESC)协同,实现 EPB 的紧急制动、AutoHold 等功能;最后随着车辆自动驾驶技术的快速发展,EPB已经具有线控驻车的执行层,已经可以扩展全自动泊车辅助系统(Auto Parking Assist, APA)、代客泊车(Automated Valet Parking, AVP)等功能,使智能驾驶成为可能。
以前由于EPB成本和技术成熟度原因,在商用车型上应用较少,但是随着EPB在乘用车的普遍配置,同时商用车驾驶人员的年轻化和商用车行业的快速发展,EPB在商用车辆上也开始迅速发展。本文基于此种情况,以某N2类总质量4.5 t采用液压制动新能源商用车为例,该车型采用同轴式电驱动桥,驻车制动采用行、驻一体制动器,操纵系统采用EPB,对EPB开发过程的各个阶段进行介绍,从而给从业人员带来一种新的开发思路。
1 功能安全
EPB作为一项底盘功能安全配置,其熄火自动驻车、坡道起步功能只是其基本配置,在实际的开发过程中要考虑到多项使用场景,例如:车辆移动时意外断电、车辆维修等。面对不同使用场景需要设置对应控制策略。
1.1 静态驻车功能及判断信号
静态驻车功能指车辆点火信号打开,车辆处于静止状态,手动拉EPB开关,执行驻车制动。判断静态驻车模式信号为ABS轮速有效性信号。
车辆熄火自动驻车功能指车辆静止时,点火钥匙转至ACC位置后,自动执行驻车制动(无需拉EPB开关)。判断自动驻车模式信号:(1)ABS轮速有效性信号;(2)点火IGN+(Ignition)信号(包括硬线及控制器局域网络(Controller Area Network, CAN)线上报文)。
外部请求接口命令功能指可以响应其他控制模块的驻车命令,实现AUTO HOLD或起停功能。
1.2 静态释放功能及判断信号
静态释放功能指IGN ON时,踩下制动踏板,手动按EPB开关,释放驻车制动。判断静态释放模式信号:(1)制动踏板有效性信号;(2)IGN+信号(包括硬线及CAN线上报文)。
起步自动释放功能指车辆上电状态,挡位在前进或后退挡,驾驶员在座位上,车辆起步时,自动松开驻车制动,并根据坡度大小进行智能调整,以防溜坡。判断起步自动释放模式信号:(1)电机运行状态、转速信号和扭矩信号及有效性信号;(2)油门踏板、挡位及驾驶员侧门开关信号及有效性信号。
失效释放功能指车辆在制动踏板和油门信号都失效情况下,EPB驻车状态,长按EPB释放开关5 s,驻车释放。判断失效释放模式信号:(1)制动踏板、油门信号及有效性信号;(2)IGN+信号(包括硬线及CAN线上报文)。
维修释放功能指车辆在静止时,EPB进入完全释放状态,长按EPB释放开关10 s~15 s,松开EPB开关,3 s内按下EPB开关,EPB执行释放到底动作,用于制动系统更换维修。判断维修释放模式信号为ABS轮速有效性信号。
1.3 动态驻车功能及判断信号
动态驻车功能指在车辆行进中,拉住EPB开关不放,EPB可以通过驻车制动进行减速,且具有后轮防抱死的功能,使车辆保持稳定的减速,高附路面减速度大于0.2g。判断动态驻车模式信号:(1)ABS轮速有效性信号;(2)ABS工作状态有效性信号;(3)点亮后尾灯请求信号。
1.4 自动驻车关闭功能及判断信号
自动驻车关闭功能按下EPB开关保持3 s内熄火,可以临时关闭自动驻车功能。判断自动驻车关闭信号为IGN+信号(包括硬线及CAN线上报文)。
2 技术路线
目前市场上主流的EPB系统分为拉索式电子驻车制动系统和集成式电子驻车制动系统。
2.1 拉索式电子驻车系统
拉索式电子驻车制动系统属于手刹制动的改进版,使用电机转动代替人力操纵驻车手柄,利用电机的正反转控制驻车拉索行程的变化,从而进行驻车和释放,其整体机构则与手刹基本相同。如图1所示。
当车辆驻车时,电机正转,通过双级齿轮减速机构进行驻车力矩的增加,再通过丝杠螺母机构,将电机的旋转运动转化为丝杠的直线运动,从而拉动驻车拉索。当丝杠上的拉力传感器达到设定的阀值时,电机停止转动,车辆保持驻车。如果此时整车出现意外断电情况,因丝杠螺母机构具有自锁功能,则会保持当前驻车状态。
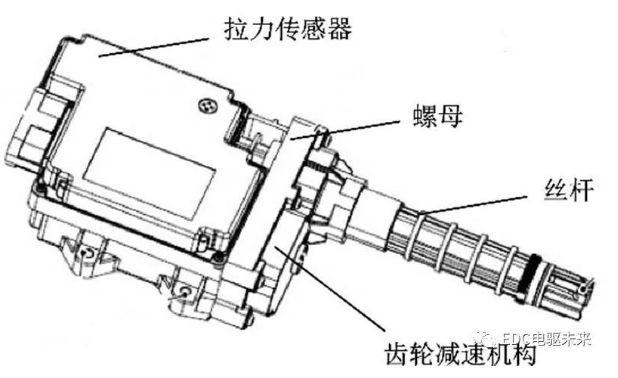
图1 拉索式EPB结构图
当驻车释放时,电机反转,通过减速齿轮和丝杠螺母机构带动驻车拉索释放,当达到设定的释放拉索行程时,电机停止转动。
2.2 集成式电子驻车系统
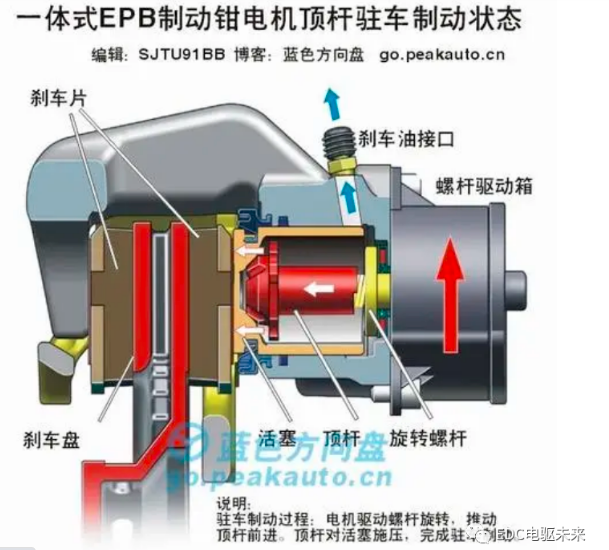
集成式电子驻车制动系统主要由四部分构成:电机、减速机构、丝杠螺母和制动器[5]。如图2所示。
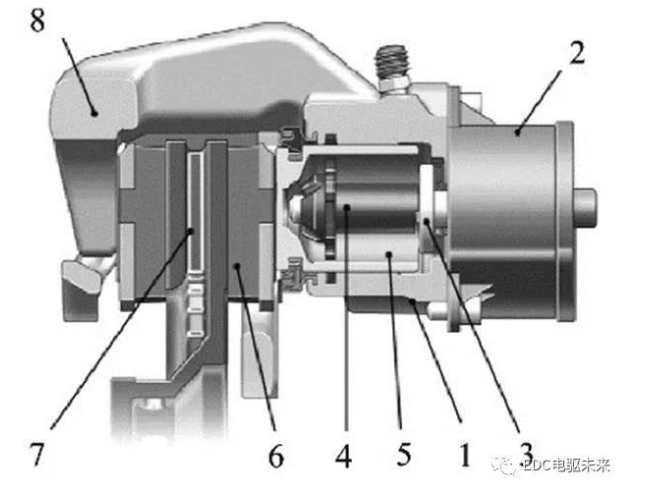
1—制动电机;2—减速增力机构;3—丝杠螺母机构的滑动丝杠;4—丝杠螺母机构的螺母;5—制动活塞;6—摩擦块;7—摩擦盘;8—制动卡钳。
图2 集成式EPB结构图
驻车制动时,电机输出力矩传递到减速机构,减速机构则将传导的力驱动丝杠螺母机构的心轴旋转,推动压力螺母直线运动,从而作用到制动活塞上,制动活塞再推动右制动蹄片挤压制动盘,达到驻车制动效果。
2.3 EPB结构与适用车型对比
集成式电子驻车制动器与行车制动器集成,因为布置空间影响,目前驻车电机的输出力基本最大达到3 kN,多应用于乘用车,以及3.5 t以下皮卡和商务车型。而拉索式电子驻车制动系统布置基本不受空间影响,一般可满足4.5 t至7 t的车辆驻车需求。本车型因为总质量达到4.5 t,考虑驻车的安全需求,采用拉索式电子驻车系统。
3 数据校核
车辆在坡道上驻车时,需要满载状态的车辆能在设计要求的最大坡度上平稳驻车。通常根据整车参数,我们可以得到此车型在上下坡时所能达到的极限坡度,所谓极限坡度指整车在一定坡度上驻车时,即使驻车制动力继续增加,车辆依然无法在此坡道上驻车。然后根据整车设计开发要求,校核车辆在满载状态下能否在设计的最大坡度上平稳驻车。
式(1)为车辆所能达到的极限上坡坡度计算公式;式(2)为车辆所能达到的极限下坡坡度计算公式[1]。
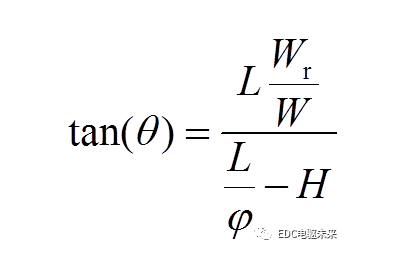
(1)
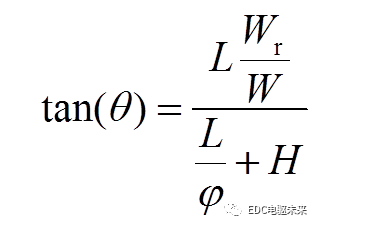
(2)
式中,θ为坡道角度;L为车辆轴距;Wr为后轴质量;W为车辆总质量;H为车辆质心高度;φ为附着系数。
以某车型计算为例,表1为车辆整车参数,表2为车辆所能在上下坡道时驻车的极限坡度。
表1 整车及制动器参数
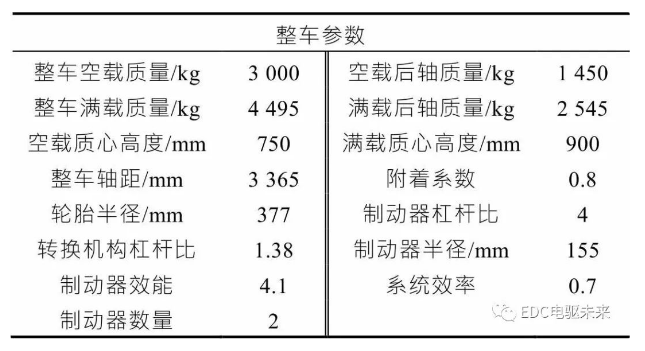
表2 整车空满载上、下坡极限坡度

整车在满载状态设计的最大坡度为30%,小于车辆的极限坡度,因此,校核在各个坡度下EPB的电机输出力,能否满足要求。具体如表3所示。
表3 整车满载状态在不同坡道需求的EPB电机力
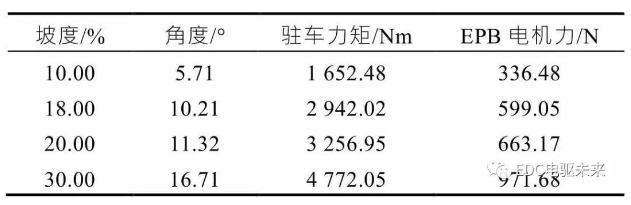
整车在满载状态设计的最大坡度为30%,其EPB电机需求输出力为971 N,而本车型采用的EPB电机输出力达到1 400 N,完全满足车型的开发需求。
4 驻车系统布置
驻车制动系统的布置不仅影响驻车的可靠性,同时影响驻车系统拉索的效率和EPB电机输出力的有效性,从而影响整车驻车效果。
该车型采用轮边驻车制动器,通过主副拉索将左右驻车制动器连接起来,再通过杠杆机构,将主拉索与EPB电机推杆相连。如图3所示。
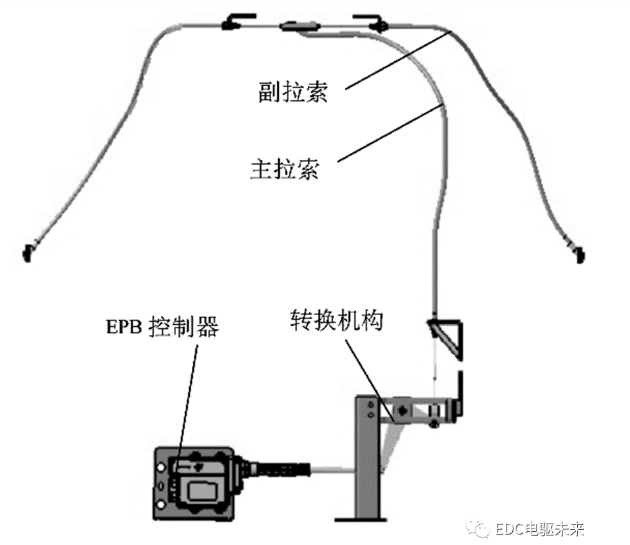
图3 EPB系统布置图
EPB输出拉索与杠杆机构连接臂呈垂直状态时,EPB的电机输出力将全部转化为主拉索的拉力。当EPB输出拉索与杠杆机构连接臂呈现一个夹角α时,只有部分拉索拉力会转化为有效输出力。
F有效=F?sin α (3)
根据计算,夹角与垂直状态偏差5°时,有效输出力损失0.38%;偏差10°时,有效输出力损失1.52%。因此,杠杆臂与拉索的夹角应保持在(90±5)°以内。
在驻车制动过程中,EPB初始运动行程为驻车制动器的空行程,随着制动蹄片与制动鼓接触,拉索拉力开始变的越来越大,直至车辆完全驻车,拉索拉力达到最大。因此,设置在拉索的终止位置,杠杆臂与拉索的夹角应保持在(90±5)°以内。
在拉索与固定支架的连接处,拉索是通过两个固定螺母与支架紧固连接,在极端情况下,存在螺栓松动、拉索脱落的风险,一旦拉索脱落,整车驻车系统将失去驻车能力。通过在拉索与支架的连接处设置倒L形卡槽,即使拉索紧固螺母松动,但因为采用此卡槽结构,驻车拉索依然不能脱出,大大增加驻车系统的安全性。如图4、图5所示。
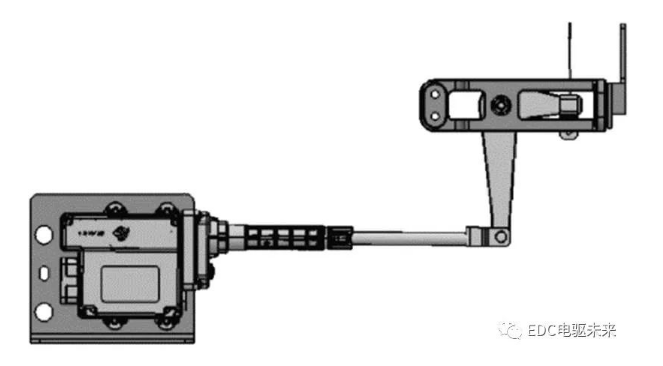
图4 拉索与杠杆臂简图
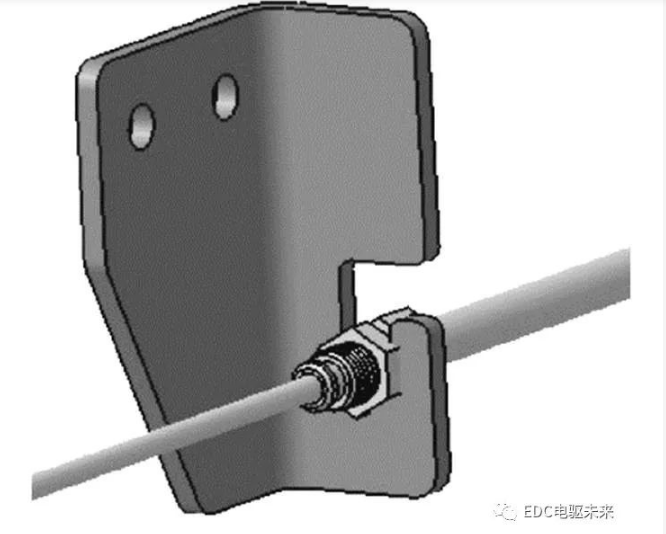
图5 固定支架倒L行简图
5 控制策略
EPB根据使用功能,分为驻车和释放两种状态。根据使用场景则分为静态驻车、坡度辅助起步、动态驻车、AUTOHOLD和车辆紧急制动。
5.1 驻车与释放判断逻辑
车辆驻车,一般是车辆保持长久的静止状态。而驻车释放,是车辆从静止状态转变为动态。因此,车辆驻车时,操纵EPB开关即可。而为了防止驻车误释放,一般驻车释放时,不仅要操纵EPB开关,同时要伴随着有效的刹车信号或油门信号,EPB才会释放驻车。
EPB在驻车时采用拉力作为判断信号,在释放时采用行程做判断信号,其主要原因在于,车辆驻车时,整车需要达到一定的驻车力矩才能满足驻车需求,使用拉索拉力作为判断信号,可以直接施加相应的驻车力矩。而驻车释放时,因为随着制动器的磨损,拉索行程会变得越来越长,如果采用驻车力矩作为释放判断信号,容易造成驻车释放不到位,而采用固定行程作为判断信号,则每次释放同样的行程,同车辆初始状态保持一致。
5.2 静态驻车
静态模式不仅包含车速为零的情况,同时包含低速的情况。通常会设计一个速度阈值,阈值速度之下的情况属于静态模式。阈值通常设置在安全车速以内,一般≤5 km/h,即在这个速度以内车轮抱死,车辆也不会产生危险状况。
静态制动的过程是,按下EPB开关,系统通过网络的车速信号判断工作模式,若是车速低于5 km/h,执行器以常规方式制动,电机正转至所需力矩时,按钮灯和仪表盘指示灯灯亮起,表示已正常驻车。坡道驻车时,会根据角度传感器提供的信号值计算出当前坡道角度,从而施加相应的力矩。
5.3 坡道辅助功能
坡道辅助起步功能在于,车辆需要起步时,只需踩下油门踏板,EPB系统经过分析计算,当电机的起步力矩达到设定的驻车力矩时,即自动解除驻车制动。
车辆在进行EPB坡道起步功能标定时,选取从小到大不同的坡度如:0%坡度,10%坡度,20%坡度,标定此坡度下需求的驻车力矩和起步力矩,当起步力矩达到设定的驻车力矩,无需驾驶员操作EPB按钮,EPB则释放驻车。其他坡度采用插值法,即可实现从最小坡度到最大坡度功能的完善[3]。
5.4 动态模式
驾驶员按下EPB开关后,若车速高于7 km/h而低于30 km/h,则会按照动态模式进行处理,如果车速高于30 km/h,则会按照紧急制动控制策略处理。EPB在动态模式下,如果驾驶员没有踩下制动踏板,只拉起EPB开关,则EPB系统判断驾驶员并没有驻车意图,只是误操作。如果车辆需要动态制动时,则需要踩下制动踏板,同时常拉EPB开关,此时EPB电机会采取轮速信号,在保证2.2 m/s2制动减速度的情况下,同时还要保证车轮不能抱死,此时EPB电机需要不断的正转和反转,即不断的驻车和释放。
5.5 AUTO HOLD
自动驻车(AUTO HOLD)是电子驻车系统的衍生功能,其极大提高了车辆的操纵舒适性和操纵方便性,尤其是针对城市工况的拥堵马路。其控制关键在于对驾驶员的驾驶意图能够准确判断,通过坡度传感器由控制器给出准确的驻车力,在起步时,驻车控制单元通过油门踏板传感器等提供的信息通过计算,当驱动力大于行驶阻力时自动释放驻车制动,从而使汽车能够平稳起步。AUTO HOLD在触发时必须同时满足以下两个条件:(1)挡位为空挡;(2)车速为静态模式。
AUTO HOLD功能有两种实现方式,一种是通过EPB的电机制动,一种是通知ESC模块进行液压制动。前者的优点在于控制逻辑简单,但缺点在于制动的作用时间稍长,噪音稍大,频繁使用可能降低电机寿命。而ESC模块通过电机加压和关闭阀的制动时间通常在100 ms以内,释放制动力时只需打开相应的阀减压,阀的开闭时间在100 ms以内。因此,AUTO HOLD功能基本都是通过ESC模块协同工作实现[4]。
5.6 紧急制动控制策略
紧急制动是指车辆在行车制动失效情况下,EPB提供制动力使车辆停下的功能。因为目前车辆上行车制动都是采用双回路制动,因此,完全失效的概率极低。紧急制动在一般情况下不会触发,只是作为行车制动的补充功能。当车速高于30 km/h时,驾驶员需要踩下制动踏板,并且常拉EPB开关,EPB则会以最大的输出力矩进行驻车。因为此时EPB电机以最大负荷工作,可能会造成EPB执行器不可恢复的损伤,从而影响系统的寿命甚至损坏,所以EPB紧急触发的的频率应该是极低的,同时所需要的触发条件也是严格的。
EPB依据以下条件判断当前状况是否采取紧急制动:(1)车速大于30 km/h;(2)制动踏板达到最大行程;(3)油门踏板行程为零;(4)EPB按钮一直按下。只有同时满足四个条件时,EPB则进行紧急制动控制,一旦EPB开关放下,则驻车功能停止。
6 试验验证
通过对4.5 t新能源液制动商用车EPB功能的标定,静态驻车、释放,动态驻车和自动驻车功能都满足了设定的功能要求。对于坡度起步功能标定结果,如图6所示。EPB标定了平地,5%坡度,10%坡度,15%坡度,20%坡度,30%坡度下的驻车力矩和驱动力矩,当驱动力矩大于驻车力矩,EPB自动释放,整车平稳起步。对于其他的坡度,利用插值法可计算所有坡度下整车需要的驻车力矩和起步驱动力矩。
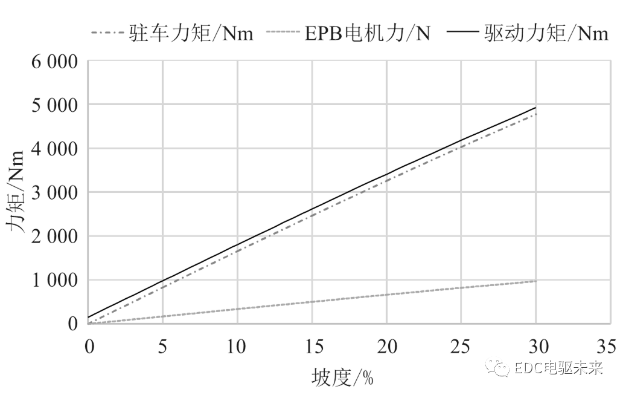
图6 各坡度下整车驻车力矩和驱动力矩
更多信息可以来这里获取==>>电子技术应用-AET<<