【仪表网 仪表研发】超疏水微型机器人可以在外界刺激下在水面上高效游动,围绕这一现象科学家们展开了诸多研究,探索它的这一特性在诸多领域的应用前景,例如细胞操作,净化水源等。然而,目前大部分对于超疏水微型机器人的研究都是围绕单一刺激的驱动模式,使得超疏水微型机器人的运动和功能在复杂的水环境中受到了限制。
多刺激响应超疏水微型机器人驱动与控制
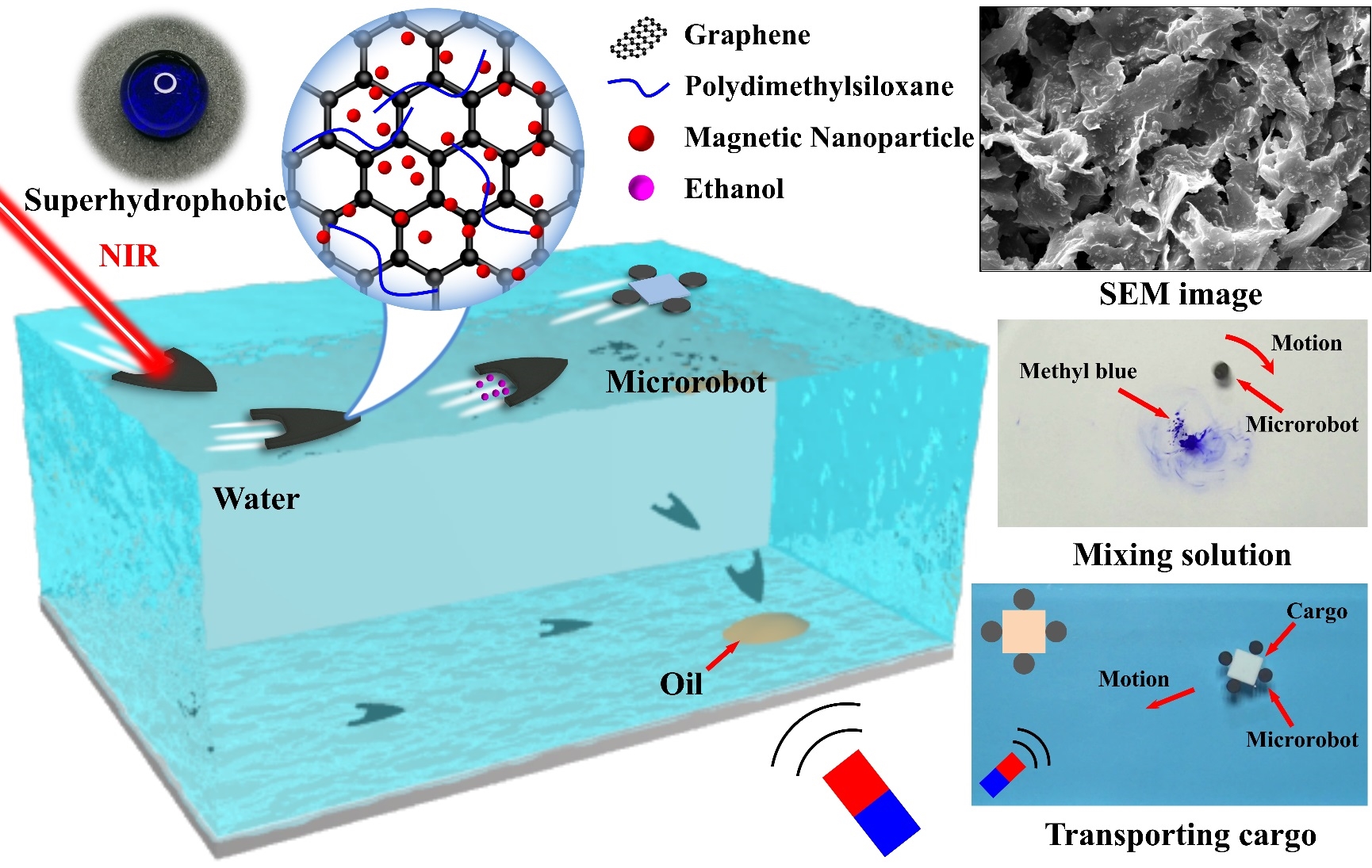
针对这一问题,中国科学院沈阳自动化研究所微纳米课题组科研团队开展了创新性研究,利用模板辅助法研发了多刺激响应超疏水微型机器人,其中超疏水的作用减少了水对微型机器人的阻碍。该微型机器人内部具有感知红外光和磁场的单元,可以储存化学试剂,使得它可以在光场、磁场等(即多场驱动)的控制下在水面快速游动。基于微型机器人的多刺激响应特性,在多场联合控制下,微型机器人实现了协同配合操作。相关研究以Multistimuli-Responsive Hydroplaning Superhydrophobic Microrobots with Programmable Motion and Multifunctional Applications为题发表于工程技术一区Top期刊ACS Nano(IF:18.027)。
在该研究中,科研人员对微型机器人的稳定性和环境适应性进行了评估,结果表明,机器人在水面上可以实现预编程的轨迹运动,尤其是在化学试剂的作用和磁场的驱动下实现了不同轨迹的运动。科研人员进一步探索了在多场驱动下,实现多个机器人运动控制的可能性。结果表明,在光场和磁场作用下,多个机器人实现了协同配合操作,可以夹取大于自身尺寸较多的结构块。随着制备工艺的提升,微型机器人的尺寸有望进一步缩小,在细胞操作,生物组织构建等领域具有应用前景。
微纳米机器人课题组始终致力于小尺寸机器人的研究,针对毫米级、微米级、纳米级机器人开展了一系列研究,在磁驱动毫米机器人、光驱动毫米机器人、热驱动毫米机器人、气泡微米机器人、细胞微米机器人、混合驱动纳米机器人等方面取得了一系列研究成果。近年来多项成果发表在国际知名学术期刊。
该研究得到了中科院青年团队计划、国家自然科学基金、创新研究团队计划和机器人学国家重点实验室的大力支持。(机器人学研究室)